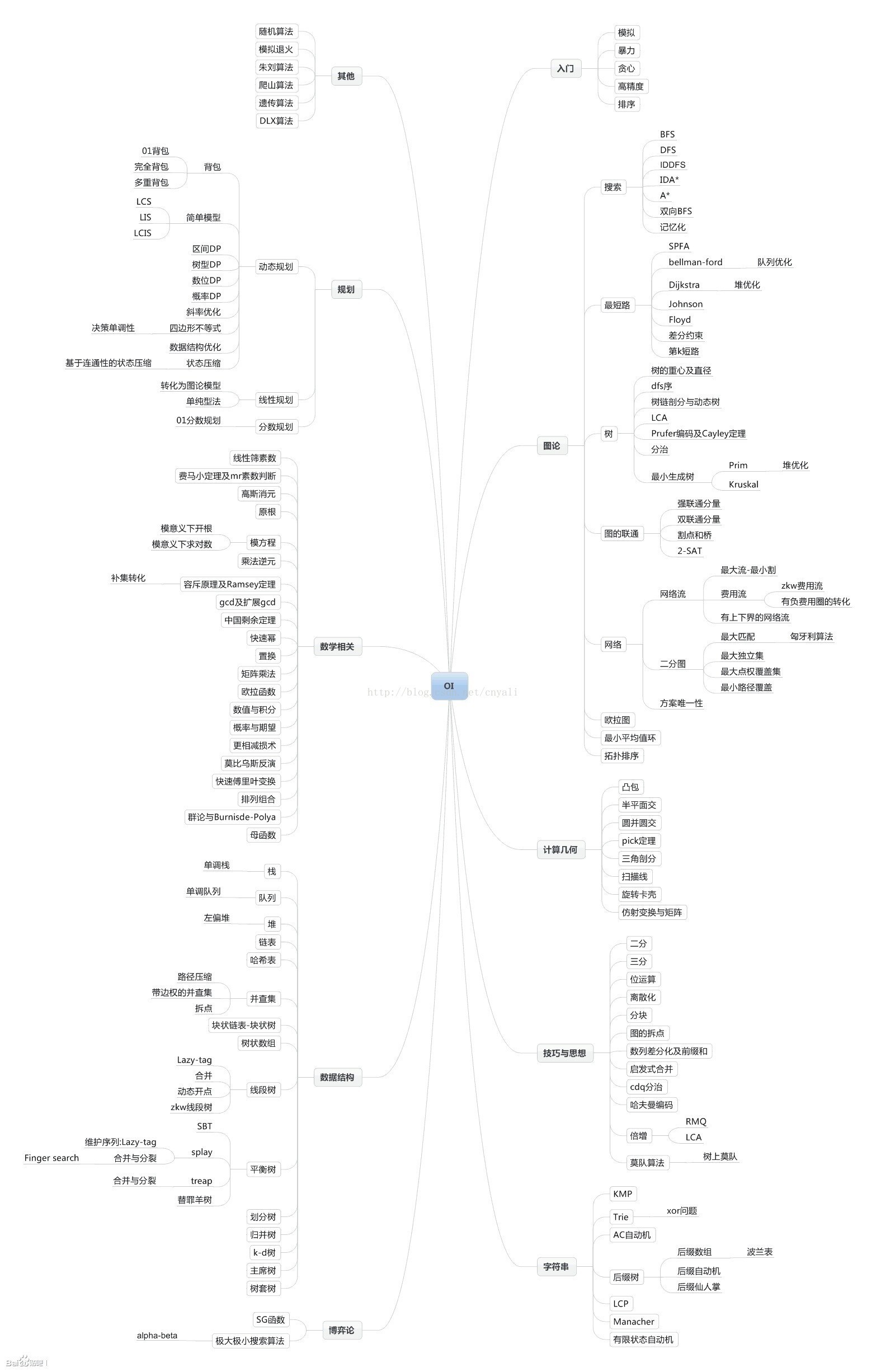
NOI 在即,对所有做过的题进行复习,并总结常用算法和数据结构的技巧。
参考了这个技能树。原作者不清,但是是在廖哥博客下载的,感谢原作者和廖哥。
{kind=link}
动态规划
数据结构
哈夫曼树
- 学会把题目加入的新限制转为数据结构原有的限制!对于 $k$ 叉哈夫曼树,如果 $(n-1)\bmod{k-1} \ne 0$,那么就要补点使得 $(n-1)$ 是 $(k-1)$ 的倍数,这样才能使得深的节点尽可能少。
线段树
-
线段树上二分涉及查询某个点向一个方向连续值相同区间的时候,不需要在外面套一个二分。只需要讨论当前区间 $[L, R]$ 是否完整包含查询区间,然后进行转移。
int query_same(int o, int l, int r, int ql) { // 假设是向右查询均为 1 的区间 maintain(o, l, r); if(ql <= l) { // 完全包含,直接二分,能返回马上返回 if(l == r) return andv[o] == FULL ? l : ql - 1; if(andv[o] == FULL) return r; else { int ret = ql - 1, mid = (l + r) / 2; pushdown(o); // ! maintain(lc(o), l, mid), maintain(rc(o), mid+1, r); if(andv[lc(o)] == FULL) { ret = max(ret, mid); ret = max(ret, query_same(rc(o), mid + 1, r, ql)); } else { ret = max(ret, query_same(lc(o), l, mid, ql)); } return ret; } } else { // 不完全包含,找往哪边走 int ret = ql - 1, mid = (l + r) / 2; pushdown(o); //! if(ql <= mid) { ret = max(ret, query_same(lc(o), l, r, ql)); } else maintain(lc(o), l, mid); // ! if(ql > mid || ret == mid) { ret = max(ret, query_same(rc(o), mid + 1, r, ql)); } else maintain(rc(o), mid + 1, r); // ! return ret; } }
数论
- 没有小于等于 $M$ 的质因数 $\Leftrightarrow$ 与 $M!$ 互质
线性代数
- 常系数齐次线性递推,在进行多项式取模的时候一定是 $\text{mod }{x^k}$,这样余式的次数才是 $0 \sim k-1$
- 算生成函数的时候,考虑清楚边界情况是否适用递推式!
- 邻接矩阵的 $k$ 次幂 = 每个点出发走 $k$ 步到达的点
- DP 中涉及到状态为一个向量时立刻想到矩阵转移
计数,概率和期望
- 计数最重要的是不重不漏
- 很多计数问题和容斥有关
- 计数常用定序的技巧,递推时枚举最小的符合条件元素,以避免重复计算
- 当要考虑 2 种顺序造成的影响时,考虑对第一种排序后再递推
- 数学期望 = 均值 = 概率密度函数的平均值
- 计算期望的常用方法:
- 结束状态明确时,根据全期望公式逆序递推(绿豆蛙的归宿)
- 枚举每个部分计算对总期望的贡献(e.g.期望使用次数),用期望线性加总(此时对结束状态无要求)(HNOI游走)
- 期望不好递推时,分离随机变量,转而递推概率(CF518D、WJMZBMR打OSU)
- 考虑采用增量的思想,计算到达某个状态的期望步数,可以改为考虑状态发生单位变化的步数
- e.g. 计算收集 $m$ 个物品的期望步数,可以改为先计算多收集 $1$ 个物品的期望步数
- 式子里面有 $\max$ 的时候可以考虑分类讨论拆掉
- 事后概率
图论
- 最短路相关问题考虑最短路 DAG
- 很多MST+数据结构的问题与 Kruskal 重构树有关
- 点分治思路:
- 考虑如何暴力统计和题目给出的点有关的信息
- 如果给出的点是重心,怎么统计子树内部有关信息(有些时候需要容斥)
- 如果和子树外部有关,考虑使用动态点分治,考虑用祖先节点的重心信息更新当前答案
网络流
- 边 $<u, v>$ 双向经过最多总次数为 $k$ ,则$c_{<u, v>} = c_{<v, u>} = k$. 这样的正确性可以考虑反悔的思想。